

服务机器人是指能为人类或设备完成有用任务的机器人,主要分为家庭服务机器人和商用服务机器人两大类。服务机器人以其应用场景的复杂性、与人交互的密切性和巨大的市场潜力,对智能化升级的需求尤为迫切,也是具身智能重要的载体之一。而通用服务机器人因为需要在多种环境中完成各类服务任务,也正在成为当下机器人的研究热点。
香港科技大学(广州)人工智能学域助理教授、副研究员、博导梁俊卫带领实验室,围绕通用服务具身智能机器人发表了一系列成果。

梁老师的最新研究成果包括基于人类视频预训练的机器人操作的适应范式和面向自然语言指令的机器人操作方法。

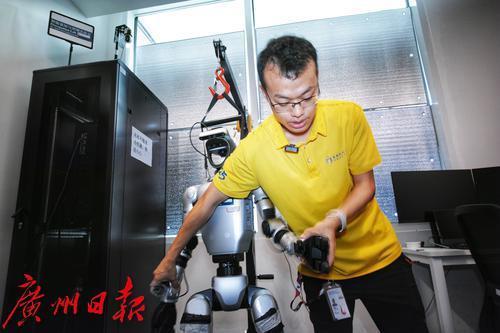
学习和人类握手的机器人。
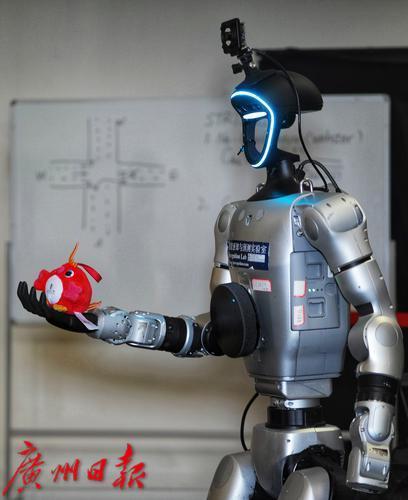
手拿港科大吉祥物的机器人。

基于人类视频预训练的机器人操作的适应范式能够解决“人类和机器人之间的差异”所带来的“机器人在操作任务中泛化性不足”的问题。

一种特别的方法能够让机器人在导航过程中预测未来行人轨迹,进而提升机器人在人类环境中的安全性。

香港科技大学(广州)人工智能学域助理教授、副研究员、博导梁俊卫带领实验室,围绕通用服务具身智能机器人发表一系列成果。
卡内基梅隆大学计算机博士梁俊卫是百度奖学金(全球10名)、雅虎奖学金、世界人工智能大会云帆奖明日之星等奖项得主,研究内容包括计算机视觉与具身智能。

梁俊卫首先提出了一个基于视觉和语言大模型的导航方法,称为“实例导航”,这一方法的核心在于如何让机器人依赖视觉和语言输入,在无地图的情况下自主进行目标导航。

实例导航任务要求机器人能够根据复杂的自然语言描述找到特定的目标物体。例如,机器人不仅要找到一个沙发,还需要根据描述找到特定的黑色皮质沙发,并且能够准确定位到沙发在房间中的位置。
梁老师研究的范式利用人机对比对齐损失,对齐人和机器人视频的语义,以一种参数高效的方式将预训练模型适应于机器人领域。

通过强化学习训练的社交导航系统能够在复杂的室内环境中导航,同时避开人类行人,甚至能够主动为行人让路。这一工作展示了未来服务机器人在人类环境中的广泛应用潜力。

未来通过引入社交导航的任务,机器人必须能够预测行人的移动轨迹,并且合理规划自己的路径以避免干扰人类的正常活动。
文/广州日报新花城记者:武威
图/广州日报新花城记者:王维宣
视频/广州日报新花城记者:王维宣
广州日报新花城编辑:刘宇



