
9月24日,腾讯Robotics X实验室发布了其最新研发成果人居环境机器人“5号”(The Five,简称“小五”),旨在打造能够与人居环境和谐相处的通用机器人。

小五独特的四腿轮足复合结构成为了设计亮点。这一设计不仅保留了足式机器人卓越的越障能力,还结合了轮式机器人高效的移动速度,使小五在各类地形上都能游刃有余。在平地行驶时,小五可以灵活切换四轮或两轮模式,根据负载需求和环境空间优化支撑空间;而在面对不平整地形、楼梯或马路牙子时,其可伸缩的直线腿配合主动力控技术,确保稳定顺利通过复杂地形。

(小五可自主折叠)
负载能力上,小五凭借直线腿设计能够有效提升承载能力,通过独立调整支撑高度实现“上摸高、下摸地”的广阔作业空间。此外,小五还能自主折叠与展开,不工作时能显著减少占用空间,便于运输和存放,体现了设计上的极致灵活性。

面对人居环境中复杂多变的任务需求,小五基于统一的控制框架,通过高精度视觉感知、定位和状态估计技术,实现了对多地形的自主适应和高效移动。同时,小五还具备多层级在线运动规划能力,能够实时检测障碍物并规划最优路径,确保在复杂环境中安全高效地完成任务。

(人-人抱扶过程数据采集)
小五也在人机交互方面展现出人性化的一面。依托触觉和视觉感知系统以及先进的识别、规划和控制算法,小五能够准确理解并预测人类需求,提供安全舒适的物理交互体验。以抱扶老人为例,小五通过综合考量老人的身体状态、运动特性以及自身能力,利用机器人抱扶过程最优控制模型,实现精准而温柔的辅助。高分辨率的触觉系统更是进一步确保了交互过程的安全性和精确性,有效避免了不必要的伤害。

(人机物理交互辅助老人起身)
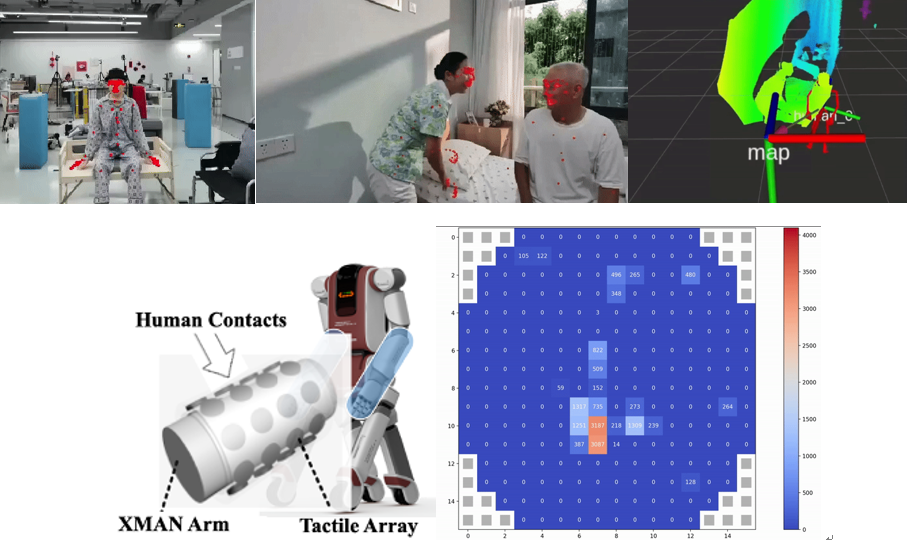
(视觉及大面积触觉感知系统)
据了解,腾讯Robotics X实验室致力于推动人机共生的发展,目前原型机小五已经在实验室环境下经过多番实测,已展现出色的运动和控制能力,未来有望在辅助养老等人居场景中率先应用。
文、图/广州日报新花城记者:阮元元
视频/广州日报新花城记:者阮元元
广州日报新花城编辑:蔡冬庆



